Vision Walk: نظام ذكي للمساعدة في التنقل باستخدام الرؤية الحاسوبية (Computer Vision)
تفاصيل العمل
تفاصيل العمل


.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
وصف العمل
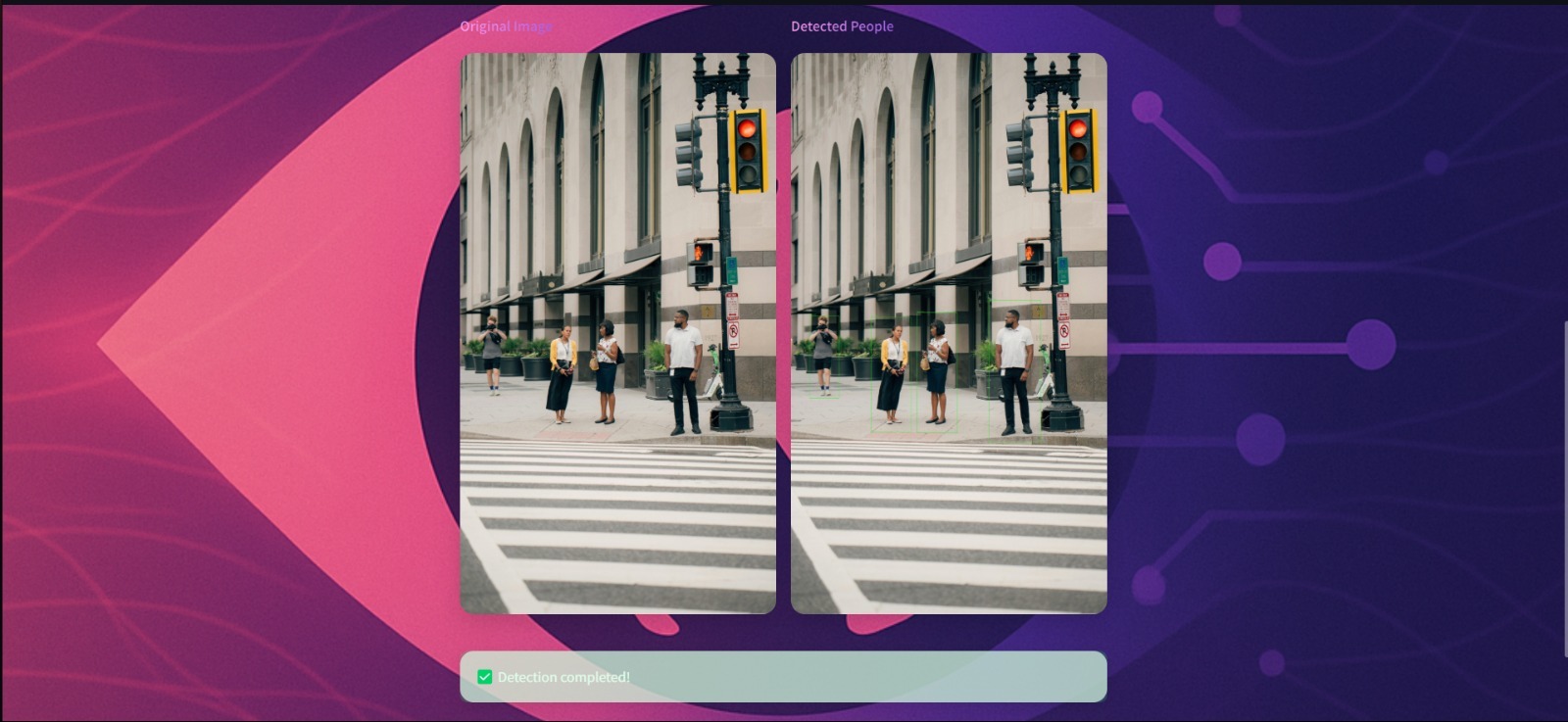
مشروع تقني متقدم يهدف إلى مساعدة الأفراد (أو الروبوتات) على التنقل بأمان في البيئات المختلفة من خلال تحليل الفيديو في الوقت الفعلي. يعتمد المشروع على خوارزميات الذكاء الاصطناعي لاكتشاف العوائق وتوجيه المسار، مما يجعله حلاً برمجياً متكاملاً يجمع بين سرعة الأداء ودقة التحليل.
المميزات التقنية (Core Capabilities):
اكتشاف العوائق (Object Detection): التعرف على العناصر المحيطة (أشخاص، سيارات، حواجز) وتحديد المسافة بينها وبين المستخدم.
تتبع المسار (Path Tracking): تحليل البيئة لتحديد "الممر الآمن" للمشي وتجنب الاصطدامات.
المعالجة في الوقت الفعلي (Real-time Processing): تحسين الكود ليعمل بأقل زمن تأخير (Latency) لضمان استجابة فورية أثناء الحركة.
التوجيه الصوتي/التفاعلي: (إذا كنتِ أضفتِ هذه الميزة) تحويل البيانات المرئية إلى تنبيهات مفهومة للمستخدم.
تواريخ العمل
المهارات المستخدمة في العمل
أعمال آخرى لـ Hagar Soliman Hemdan
تصميم وتطوير واجهة الويب لمنصة أمانة كابيتال للاستثمار
مشروع متكامل يجسد التحول الرقمي لمنصة استثمارية رائدة. قمت في هذا العمل بالمرور بكافة مراحل بناء المنتج الرقمي، بدءاً من...